
Iowa State University Department of Civil, Construction and Environmental Engineering professor In-Ho Cho has just been issued a United States Patent in collaboration with ISU’s Department of Electrical and Computer Engineering (ECpE) for a multidisciplinary, microsoft robotic device controlled through air.
A few years ago, ECpE’s Dr. Kim and University of Pennsylvania’s Dr. Paek began a project with Cho. Together, they formed a team to analyze and design a micro, soft-robotic arm. With the help of Cho’s structural engineering knowledge, they were able to successfully design and receive a patent for what is now called a multiple-turn micro robotic tentacle.

This tentacle has the rare ability to gently pick up microscopic objects without causing any harm. The tentacle has already handled fish eggs and a live ant without damaging either the egg or ant.
In order to have the tentacle be safe and secure, Cho applied his knowledge of structural beam theory to the fabrication of the device. In civil engineering, beam theory measures and analyzes how a slender beam deforms. This is commonly used in bridges, buildings or other infrastructure.
“I provide the team with how to analyze and design the slender robotic arm using the beam theory, and then the ECpE team fabricates the design using soft material,” Cho said.
While the design appears to be simple, it is challenging to produce multiple turns with such a delicate structure at this small of a scale. The device is activated simply through air, straightening or curling its arm depending on the amount of air pressure injected through the arm. This is called pneumatic control, moving pressurized or compressed air to a tube through signals.
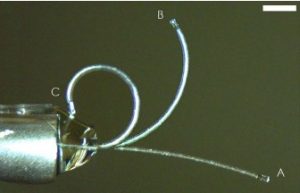
“Without air, it just returns to being a straight line,” Cho said. “But when you inject it with air, it will roll and have the ability to hold things. Because of the bump we designed and the thinness of the pipe, this long arm can roll back using air.”
With the issued patent, there are many outlets for the use of this tentacle. The exact future of the device is unknown, but it is clear that the medical industry can greatly benefit from it. Since the tentacle is known as a soft robotic (elastic and gentle), opposed to a hard robotic that can potentially be dangerous, it has the potential to be used in the human body, for something such as a hearing aid.
“We originally proposed this idea to help cure a damaged cochlear structure, being placed on the inside of the human ear. But eventually, this could be used to pick up anything microscopic, even the human egg,” Cho said. “We are thinking toward the future – if you put some device inside your ear, it should be soft and we should be able to control that.”

This is Cho’s first patent at ISU solely based on the collaboration of ISU researchers. This research was supported by the National Science Foundation’s interest in soft biomedical devices.
“This patent is multidisciplinary,” Cho said. “No single department can answer this question. So for me, as a structural engineer, I am applying my theory to a different domain – microscopic robotics – and ECpE fabricates it using their own knowledge of soft material. This patent highlights our multidisciplinary success from different domains.”
The patent can be used in the biomedical device industry, and through healthcare researchers. More and more researchers are starting to gravitate towards soft robotics like this, opposed to hard robotics.
While Cho is a structural engineer, and not an electrical one, he says soft robotics are still very relevant in the civil engineering industry.
“Soft robotics can be used in the infrastructure industry, too,” Cho said. “Sometimes we have to deal with very delicate reconnaissance, or after natural hazards we have to rehabilitate very sensitive structures, so this kind of soft robotics can be used to sensitively recreate infrastructures.”
The robot is about half of a millimeter in size. But with it’s design, and through applying beam theory and analyzing the structure, the tentacle can be designed at almost any size – big or small.
Along with improving the biomedical industry in things like hearing aids, or potentially even as a surgical device to remove or wrap around human eggs, this device could also eventually evolve into a sensor.
“If we flow light inside this tentacle, this tentacle can be used as a sensor, because the light will go through the tentacle and turn back and reflect it,” Cho said. “But depending on how it reflects the light, it can be used as a touching sensor. This could be another futuristic application – an optical, soft touching sensor.”