
Soybeans are an important crop for the global economy, with widespread usage from cooking oil and livestock feed to biodiesel and industrial products. However, significant soybean yield losses are caused by pests and pathogens every year. Engineers at Iowa State University are working to solve these problems.
The most damaging pest or pathogen of soybean in North America is the soybean cyst nematode (SCN). Every summer, SCN females produce thousands of microscopic eggs, which can lie dormant in the soil for up to 10 years in the absence of a soybean host. During the growing season, the eggs hatch and release juvenile worms that find their way to soybean roots and develop feeding sites within the roots, living off the plant nutrients. The infected crop exhibits minimal symptoms above ground, making it difficult to estimate the seriousness of nematode infestation in the field.
The only definite way to assess the numbers or population densities of SCN in the field is to collect soil samples and extract the dead females full of eggs, then extract the eggs from the cysts and count them under a microscope. The entire extraction process is labor-intensive and expensive. Processing the soil samples is usually done by soil laboratories or plant diagnostic clinics at land-grant universities, such as Iowa State. The cost of sample processing generally ranges from $25-$50. Knowing the SCN egg number in the field before the planting season allows the farmers to make informed judgments about when and how to deploy integrated management practices in a timely manner.
“We asked ourselves if we can automate the multiple steps of soil sample processing to obtain SCN egg counts in a reliable and cost-effective manner,” said Iowa State Department of Electrical and Computer Engineering (ECpE) Associate Professor Santosh Pandey.
“We quickly learned that soil samples are difficult to work with because of their inherently diverse physical properties. It is challenging to extract and count microscale particles with acceptable accuracy. It was no surprise that automation of soil processing steps was under-explored,” Pandey added.
The collaborative project was started under the supervision of Pandey and Gregory Tylka, Morrill Professor with ISU’s Department of Plant Pathology and Microbiology and Director of the Iowa Soybean Research Center. The funding support was provided by a grant from the National Science Foundation’s Instrument Development for Biological Research, Directorate for Biological Sciences program.
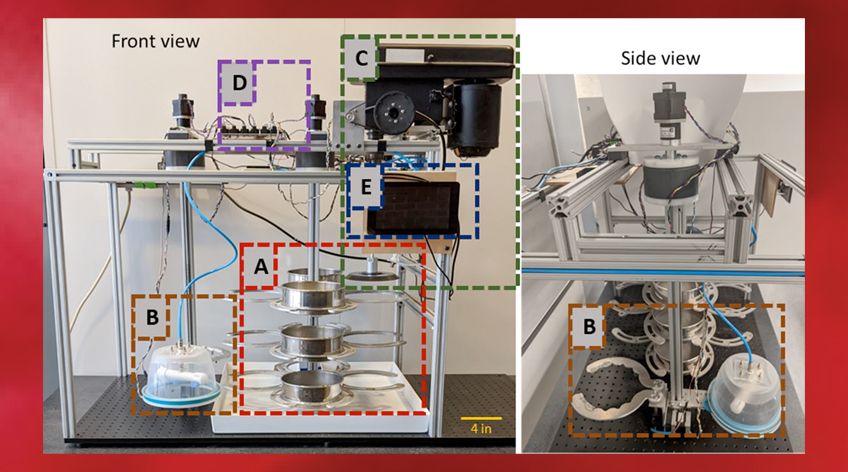
Over the past four years, staff and several graduate students from the two ISU departments have been involved with developing and testing a robotic instrument and imaging technology for extracting and counting SCN eggs. The robotic instrument replicates the mechanical operations involved in the manual wet-sieving extraction technique and has been rigorously tested on soil samples from nematode-infested fields near the cities of Muscatine and Nevada, Iowa. The hardware, electronics and functions of the robotic instrument (e.g. sieving, filtering, grinding, washing, gripping and sieve manipulation) are controlled by a simple graphical user interface on a touchscreen display.
The extraction method based on the robotic instrument was published in Scientific Reports with ECpE graduate student Christopher Legner as the first author. The quantification method, employing a wide field-of-view imaging with deep learning, was published in PLoS ONE, where the joint first authors are Legner and Upender Kalwa, another ECpE graduate student. A United States Patent and Trademark Office patent (USPTO) filed by Iowa State University Research Foundation (ISURF) on the invention of the agricultural robotic instrument was recently approved (US Patent No. 10,900,877). The inventors on the USPTO patent were Legner, Zach Njus, Kalwa, Taejoon Kong, Augustine Beeman, Jared Jensen, Leland Harker, Gregory L. Tylka, and Pandey.
“We are grateful to Electronics Technician II Leland Harker, Greenhouse Manager David Soh and Assistant Scientist I Chris Marett for their persistent help with our experiments. This unique project has helped train three graduate students in hardware and software implementations for field applications and has provided a successful launchpad for their careers as automation and software tools experts in top U.S. agricultural companies within Iowa,” Pandey said.